Kybernetik – Der Regelkreis
Eine der wichtigsten Aufgaben von Kybernetiker*innen ist es, dynamische Systeme gezielt zu beeinflussen. Dazu verwendet man Regler. Hier zwei Beispiele:
- Das Thermostat eines Backofens sorgt dafür, dass das Innere des Ofens auf die richtige Temperatur geregelt wird. Ein Sensor misst dazu die Ofentemperatur und schaltet entsprechend die Heizelemente an und aus.
- Der Tempomat im Auto ist dafür zuständig, dass ein Auto eine bestimmte Geschwindigkeit hält. Je nachdem, ob es bergauf oder bergab fährt, sorgt der Regler dafür, dass das Auto mehr oder weniger Gas gibt.
Das Quellen- und Literaturverzeichnis zu dieser Seite finden Sie hier.
Aufgabe 1 von 1
Quelle: Universität Stuttgart
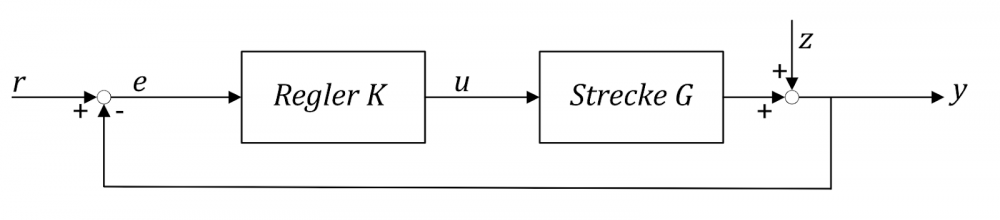
In Abb. 1 wird ein „erweiterter linearer Standardregelkreis” gezeigt.
Die Strecke ist der Teil des Systems, der die zu regelnde Größe enthält, also das Auto oder der Backofen. Von außen wird die Führungsgröße vorgegeben. Diese gibt vor, welcher Sollwert erreicht werden soll, beim Tempomaten also eine bestimmte Geschwindigkeit.
Aus der Differenz von Führungsgröße und Regelgröße (dem Istwert) wird der Regelfehler bestimmt, also das Zuviel oder Zuwenig an Temperatur oder Geschwindigkeit. Aus diesem Regelfehler berechnet der Regler die Stellgröße, welche die Strecke beeinflusst, also die Heizelemente oder das Gaspedal.
Dabei muss der Regler oft auf äußere Einflüsse (die Störgröße) reagieren; z.B. jemand öffnet den Backofen oder das Auto fährt einen Berg hinauf. Funktioniert der Regler ordnungsgemäß, nähert sich die Regelgröße immer mehr der Führungsgröße an und der Regelfehler verschwindet.
Ordnen Sie den folgenden Begriffen die jeweils richtige Bezeichnung im Regelkreis zu.
Störgröße
Stellgröße
Führungsgröße
Regelgröße
Regelfehler
z
u
r
y
e
Das wichtigste Element in einem Regler ist die Rückführung des Messwerts der Regelgröße. Dieses Feedback erlaubt dem Regler, auf unbekannte Störungen zu reagieren. Dadurch, dass der Ausgang der Strecke mit dem Eingang des Reglers verbunden wird, entsteht ein Regelkreis.