Als Projektingenieur*in könnten Sie zum Beispiel Leiter*in einem Teams sein, in dem ein neuer Akkuschrauber entwickelt werden soll. Einige Bauteile können fertig eingekauft werden, andere müssen neu entwickelt und gebaut werden.
Um einen geeigneten Elektromotor von einem zuliefernden Betrieb auswählen zu können, muss die maximale elektrische Leistung während eines Schraubvorganges bekannt sein. Diese hängt über einen Gesamtwirkungsgrad wiederum von der maximal zu erbringenden mechanischen Leistung ab.
Aus Messungen an älteren Modellen sind typische Zeitverläufe des Drehmomentes \(M\) und der Winkelgeschwindigkeit \( \omega\) bei einem Schraubvorgang bekannt:
\(M\left(t\right)=a\ t\)
\(\omega\left(t\right)=\sqrt{b\ (6-t)}\)
Die Größen \(a\) und \(b\) sind Konstanten. Es gilt nun, die maximale mechanische Leistung in Abhängigkeit der beiden Konstanten zu berechnen Dieser Prozess erfolgt in mehreren Schritten.
Im ersten Schritt erfolgt die Auswahl eines geeigneten physikalischen Gesetzes.
Welches der folgenden physikalischen Gesetze gibt den Zusammenhang zwischen der mechanischen Leistung \(P\), dem Drehmoment \(M\) und der Winkelgeschwindigkeit \(\omega \) richtig wieder?
Bitte auswählen
\(P=M\cdot\omega\)
\(P=\frac{M}{\omega}\)
\(P=M+\omega\)
\(P=M\ \omega^2\)
\(P=M^2\ \omega\)
Wenn sich das Drehmoment erhöht, muss mehr Leistung aufgebracht werden, d.h. die Leistung ist proportional zum Drehmoment. Um die Drehzahl zu erhöhen, muss die Leistung auch erhöht werden, d.h. die Leistung ist auch proportional zur Winkelgeschwindigkeit. Das lässt sich in der Formel \(P=M\cdot\omega\) zusammenfassen.
Aufgabe 2 von 3
BERECHNUNG DER LEISTUNGSKURVE
Im zweiten Schritt erfolgt die Berechnung der Leistungskurve. Wenden Sie das in Schritt 1 gewählte physikalische Gesetz an, d.h. setzen Sie die gegebenen Zeitverläufe von Drehmoment und Winkelgeschwindigkeit ein und berechnen Sie die Leistungsfunktion in Abhängigkeit der Zeit.
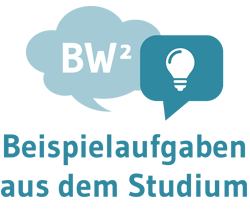
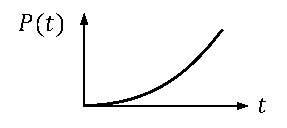
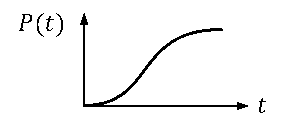
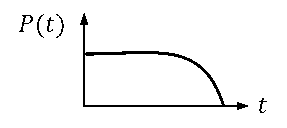
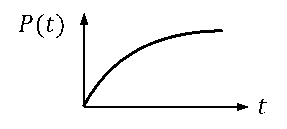
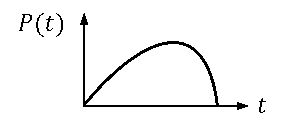
Welche der folgenden Kurven gibt die Leistung qualitativ richtig wieder?
Bitte auswählen
Abb. 2
Abb. 3
Abb. 4
Abb. 5
Abb. 6
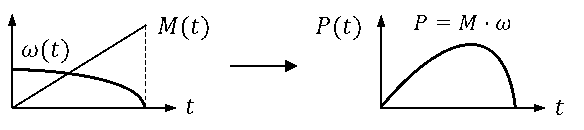
Das linke Diagramm zeigt die gegebenen Zeitverläufe von Drehmoment und Winkelgeschwindigkeit. Sowohl an Anfang als auch Ende der Bewegung ist eine der beiden Funktionen Null, d.h. die Leistung muss ebenfalls Null sein und irgendwo dazwischen einen Maximalwert haben:
Abb. 7
Die Leistungsfunktion lautet: \(P\left(t\right)=at\ \sqrt{b\left(6-t\right)}\).
Aufgabe 3 von 3
BERECHNUNG DER MAXIMALEN LEISTUNG
Im dritten Schritt erfolgt die Berechnung der maximalen Leistung.
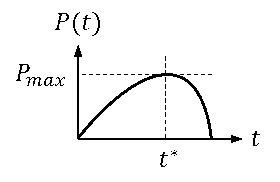
Es ist bekannt, dass die Leistungskurve einen Extremwert haben muss.
Abb. 8
Verwenden Sie die mathematische Methode der Extremwertbestimmung, um den Zeitpunkt und Wert der maximalen Leistung zu berechnen.
Welche Lösung ist richtig?
Bitte auswählen
\(t=1\qquad P_{max}=a\ \sqrt{5b}\)
\(t=2 \qquad P_{max}=4a\ \sqrt b\)
\(t=3\qquad P_{max}=3a\ \sqrt{3b}\)
\(t=4\qquad P_{max}=4a\ \sqrt{2b}\)
\(t=5\qquad P_{max}=5a\ \sqrt b\)
Die Leistungsfunktion lautet (vgl. Schritte 1 und 2):
\(P\left(t\right)=at\ \sqrt{b\left(6-t\right)}\).
Nach Anwendung der Produktregel ergibt sich die 1. Ableitung der Leistungsfunktion:
Die Bedingung für einen Extremwert ist, dass die 1. Ableitung Null ist (notwendiges Kriterium). Daraus ergibt sich die Gleichung:
\(3ab\ \left(4-t\right)=0\).
Die Extremstelle ist also \(t^*=4\).
Einsetzen in die Leistungsfunktion ergibt:
\(P_{max}=4a\sqrt{2b}\).
Bemerkung: Streng genommen müsste noch gezeigt werden, dass die 2. Ableitung ungleich Null ist (hinreichendes Kriterium). Hierauf wird hier verzichtet, da bereits in Schritt 2 anschaulich erklärt wurde, dass ein Maximum existieren muss.